

 Продукты
Продукты
 Возможности
Возможности
Возможности
Возможности Robotmaster
В среде Mastercam с помощью мощных средств подготовки траекторий создается последовательность технологических операций обработки. При этом технолог использует привычную методику и приемы, зарекомендовавшие себя в деле программирования станков с ЧПУ. Когда операции обработки подготовлены, технолог активизирует функции Robotmaster для того, чтобы выбрать конкретный вариант исполнения роботизированной ячейки и навесной агрегат, а затем указать ряд специфичных параметров. После этого выполняется симуляция и проверка движений на виртуальной ячейке. При необходимости можно провести оптимизацию или тонкую отладку параметров. Когда все операции обработки отлажены, осуществляется выпуск УП.
Эффективное создание геометрии
Рациональные CAD-инструменты позволяют выполнять проектные работы легче, чем когда-либо прежде. Используйте предварительный просмотр при создании геометрии, это позволит вам быстро изменять и редактировать параметры, пока вы не получите именно то, что хотите. Кроме того, многие традиционные функции объединены, что упрощает создание даже самых сложных деталей.

Каркасное, поверхностное и твердотельное моделирование
Трансляторы данных
Если вы получаете данные в файле из какой-либо CAD-программы или в нейтральном формате, то надежный и точный транслятор данных имеет важное значение для вашего производства. Доступны трансляторы данных для файлов IGES, Parasolid®, SAT (ACIS solids), AutoCAD® (DXF, DWG, и Inventor TM файлы), SolidWorks®, Solid Edge®, STEP, EPS, CADL, STL, VDA, и ASCII, CATIA®, Pro/E®, и т.д.
Легко проводить изменения
На производстве довольно часто можно встретиться с изменениями геометрии деталей и в помощь технологам имеются 2 мощных инструмента – Сравнение Файлов и Распознание изменений – которые позволяют выявить изменения в CAD модели и правильно перегенерировать обработку. Теперь, с помощью нескольких щелчков мыши, вы можете сразу найти и обработать эти изменения, экономя драгоценное время.

Автоматическое распознание изменений
Программирование на основе моделей из CAD/CAM систем
Создайте точные, простые или сложные траектории робота без обучения по точкам с помощью Mastercam Mill или Router. Программирование траектории движения робота производится графически, используя те же процессы и инструменты, что и при программировании станков с ЧПУ, используя геометрию (линии, дуги, грани и поверхности тел). Как только геометрия выбрана, пользователь в диалоговых окнах указывает необходимые параметры. Программа автоматически создает траекторию робота на основе приведенной выше информации.
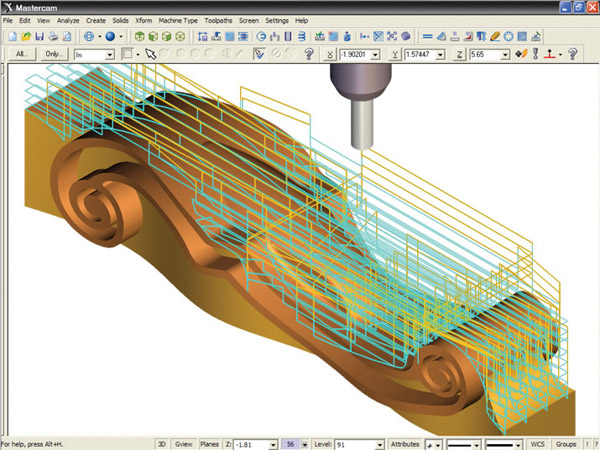
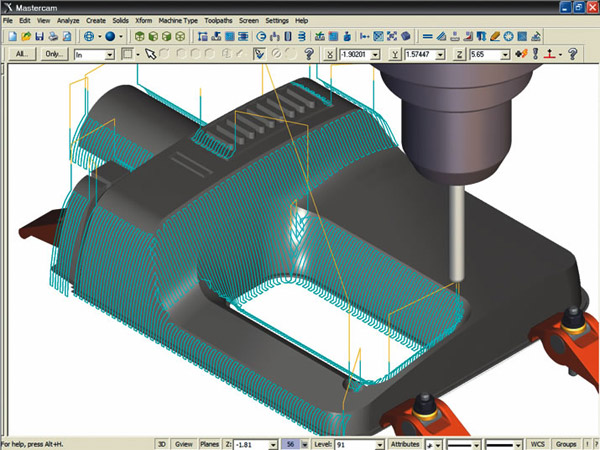
Автоматизированыый съём материала
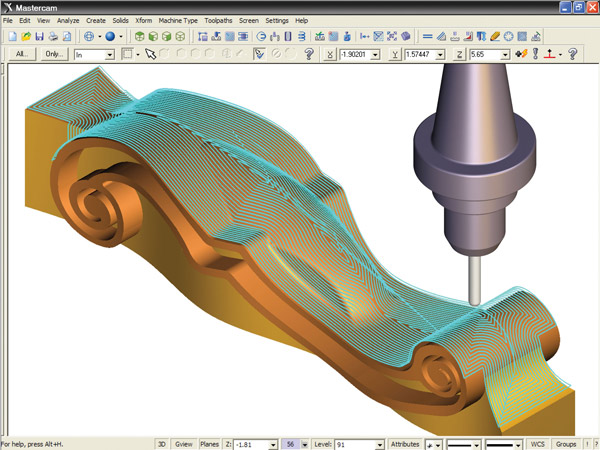
Чистовая обработка
Дообработка
Оптимизированная Чистовая обработка
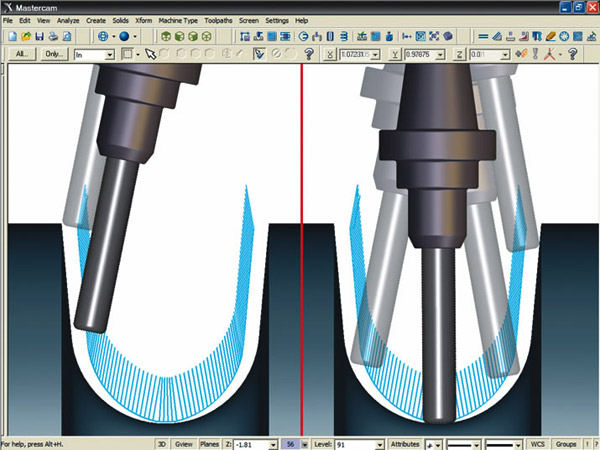
Контроль оси инструмента
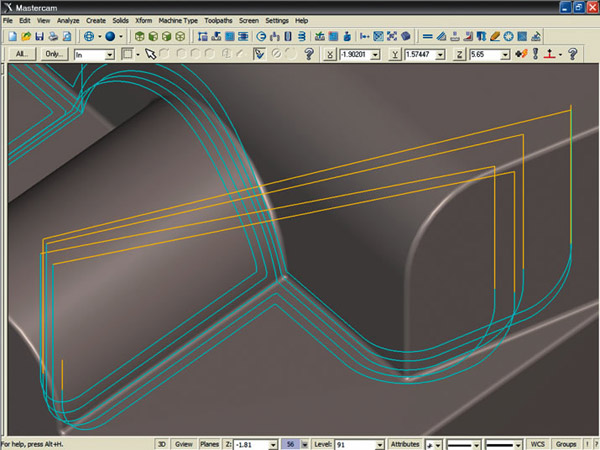
Гибкая ориентация инструмента
Ассоциативность траекторий
Полная ассоциативность между вашей моделью и траекторией обработки позволяет сделав изменение в вашей модели обновить траекторию обработки одним нажатием кнопки мыши.
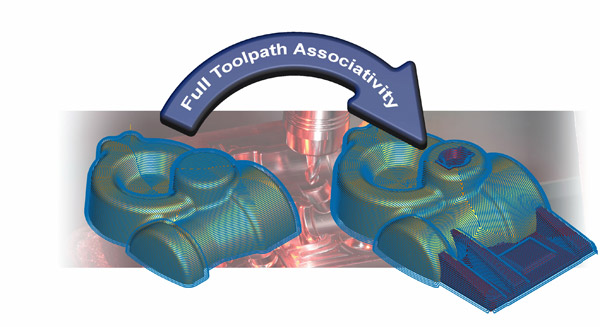
Траектория ассоциативна с CAD моделью
Библиотеки конфигураций роботов
Применение роботов обеспечивает большую свободу выбора и позволяет использовать 2 принципа обработки:
1) Инструмент к детали (Tool to Part). Рабочий агрегат (например, шпиндель) крепится на манипуляторе, который подводит его к неподвижной детали и перемещает относительно нее.
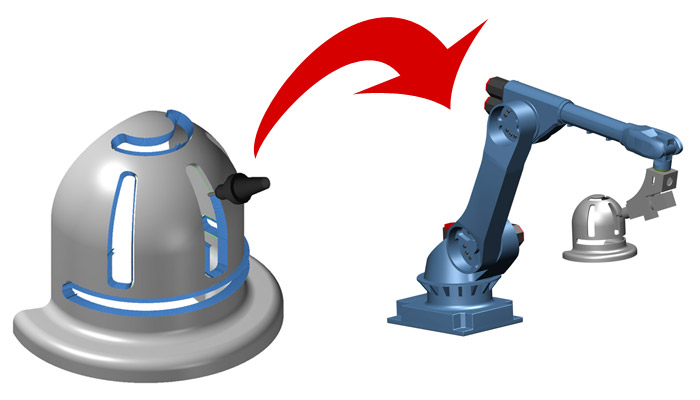
2) Деталь к инструменту (Part to Tool). В этом случае деталь помещается в захват манипулятора, который будет перемещать её относительно неподвижно установленного агрегата (например, того же шпинделя).
Библиотеки конфигураций роботов обеспечивают:
- Выбор производителя роботов
- Выбор и назначение операционных параметров:
- навесного оборудования на манипуляторе
- данных о рабочей плоскости и инструментах на навесном оборудовании
- параметров для выполнения рабочих и вспомогательных движений
- принципа отслеживания положения основной оси инструмента
- параметров для устройств, обеспечивающих дополнительные линейные перемещения и повороты (максимально допустимое количество: три управляемые линейные направляющие и 2-осевой поворотный стол)
- параметров для смены инструмента
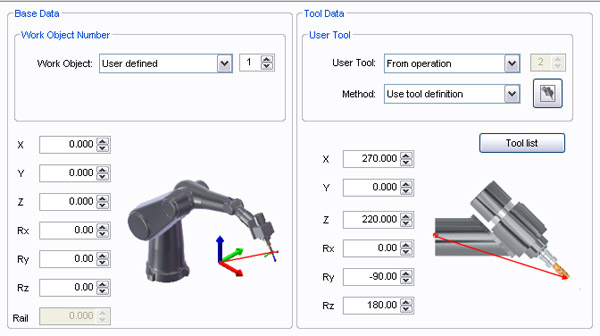
Управление начальными установками
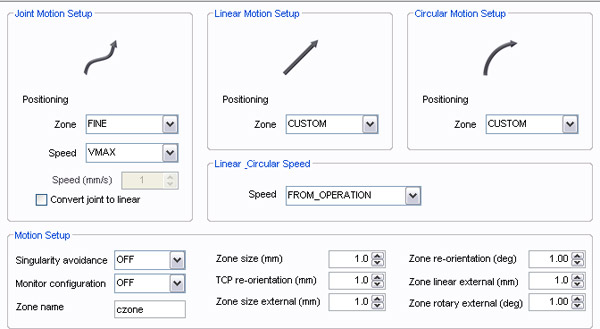
Настройки параметров специфичных движений робота
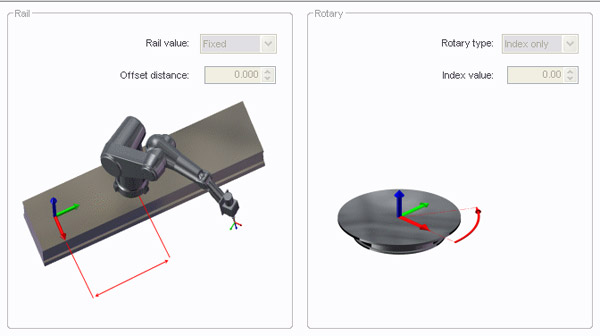
Управление параметрами линейной оси и оси вращения

Выбор исполнительного механизма
Преобразование 2–5-осевых траекторий инструмента в движения робота
Поскольку основой роботизированной ячейки является манипулятор с 6-ю управляемыми осями вращения, созданную в среде Mastercam траекторию инструмента необходимо преобразовать во вращения суставов манипулятора – так, чтобы обеспечить движение инструмента по этой траектории. Для решения данной задачи используется ряд параметров для расчета рабочих и вспомогательных движений.
Преобразование траекторий инструмента в движения робота
Оптимизация
Специальные средства Robotmaster позволяют быстро подкорректировать и оптимизировать движение манипулятора, используя возможность поворота инструмента вокруг своей оси. Данный подход позволяет избежать различных коллизий и критических ситуаций, таких как:
- соударение рабочих частей робота и навесного оборудования (между собой, с обрабатываемой деталью, с другими элементами роботизированной ячейки)
- сингулярность (неоднозначность), когда взаимное положение суставов робота таково, что нет однозначного решения для обеспечения дальнейшего перемещения
- ситуация, когда какой-либо сустав повернут на предельно допустимую величину и дальше вращаться не может
- наличие зон, до которых манипулятор не может “дотянуться”
- наличие участков траектории, где для обеспечения постоянства скорости линейного движения инструмента скорость вращения суставов достигает предельно допустимых значений
Работа с данным функционалом происходит следующим образом: вначале траектория просчитывается на предмет наличия коллизий и результаты выводятся в виде цветовой диаграммы. Далее эта диаграмма используется для интерактивного изменения параметров и определения необходимого поворота вокруг оси инструмента в каждой конкретной точке по всему пути движения инструмента.
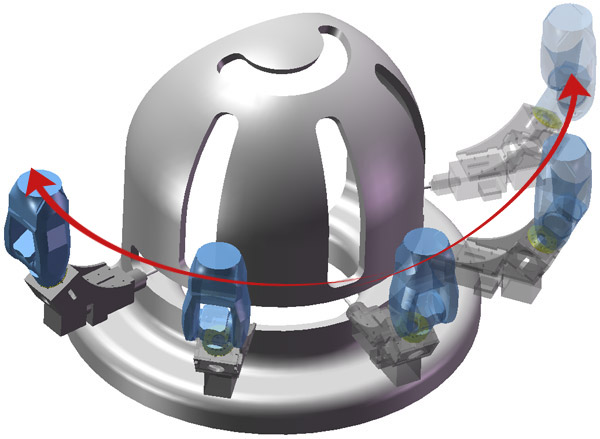
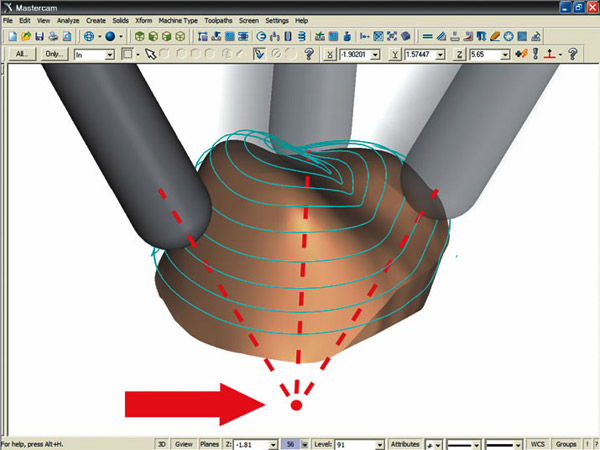
Фиксированное положение инструмента

Ориентация инструмента вращением
Сохранение положения инструмента относительно траектории
Вращение инструмента по траектории
Симуляция обработки
Для обеспечения максимальной реалистичности в режиме проверки движения робота, в среде Robotmaster создается полномасштабная модель роботизированной ячейки, которая используется для симуляции движения и отладки параметров. Встроенный симулятор обеспечивает:
- просмотр траектории инструмента – пошагово или непрерывно
- автоматическое определение возможных коллизий
- ручное управление всеми осями робота
- возможности включать или выключать отображение составных элементов оборудования в ячейке при просмотре
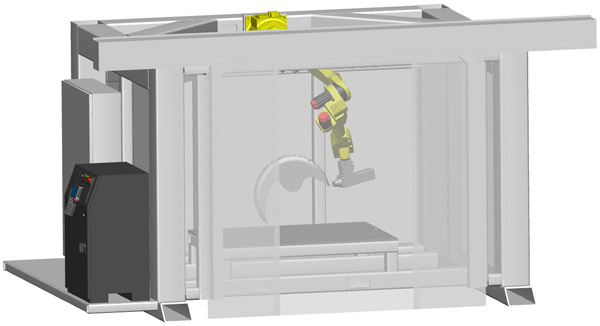
Проверка при отображении всех элементов оборудования
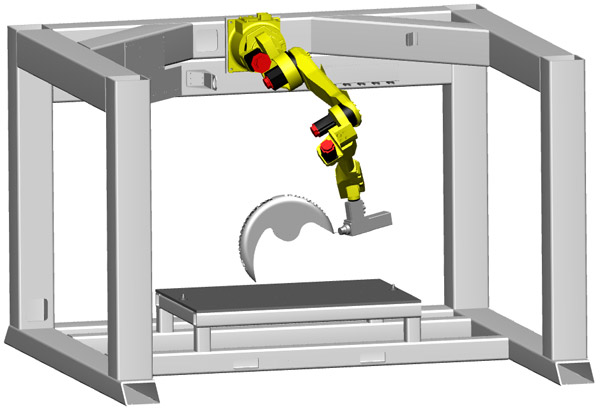
Проверка при выключенном отображении составных элементов оборудования
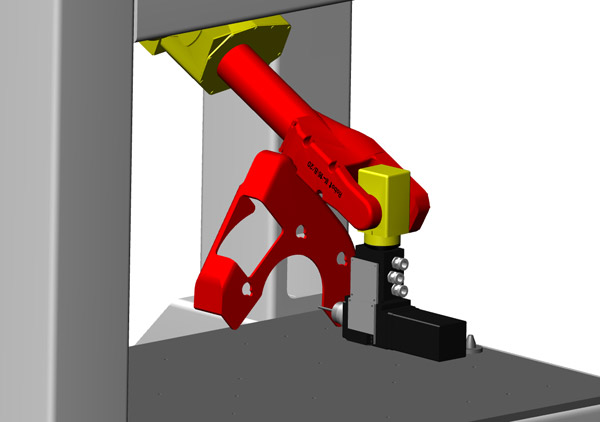
Проверка на столкновение робота и детали
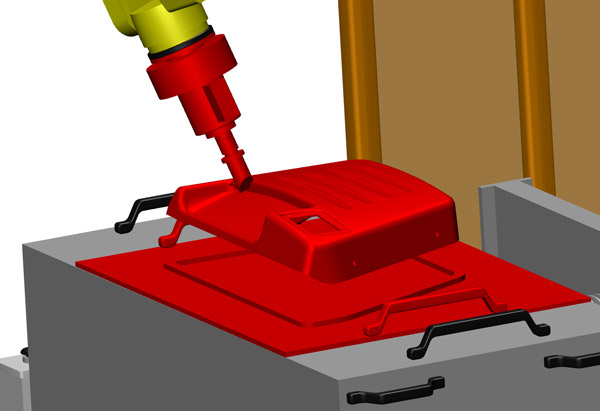
Проверка на столкновение инструмента и детали
Генератор УП
В среду Robotmaster встроен постпроцессор, который обеспечивает:
- выпуск УП в соответствии с синтаксисом, который понимает конкретный робот
- автоматическую проверку траектории на коллизии перед генерацией УП
- автоматическое разбиение УП на подпрограммы, если её объем превышает максимально допустимое значение
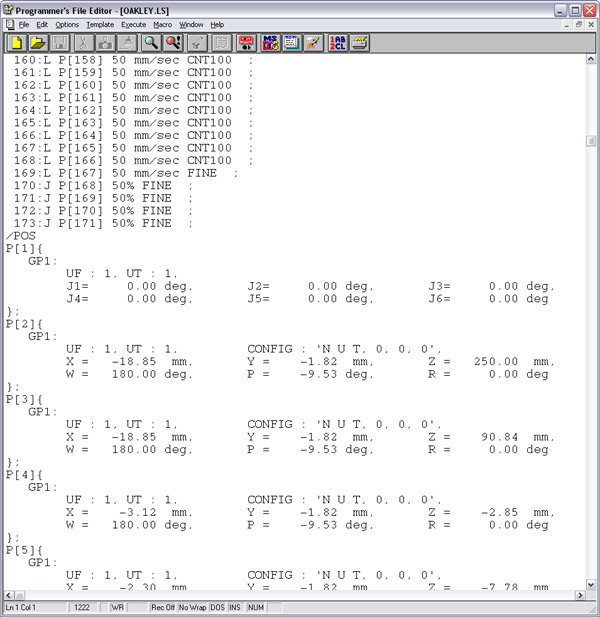
Выпуск УП в соответствии с синтаксисом, который понимает конкретный робот
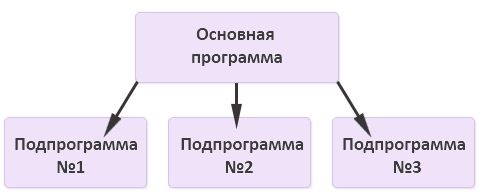
Автоматическое разбиение УП на подпрограммы, если её объем превышает максимально допустимое значение
Copyright © 2009 Jabez Technologies Inc. All Rights Reserved
Copyright © 2012 COLLA Ltd. All Rights Reserved

Copyright © 2012 COLLA Ltd. All Rights Reserved