

 Продукты
Продукты
 Возможности
Возможности
ROBOTMASTER V5
Версия 5 системы Robotmaster на платформе Mastercam X5 содержит инновационные инструменты для программирования и оптимизации траекторий исполнительных органов робота. Опираясь на мощные средства оптимизации движений робота, Версия 5 позволяет получать траектории с той же лёгкостью и функциональностью, как и для станков с ЧПУ.
Анализ рабочего пространства
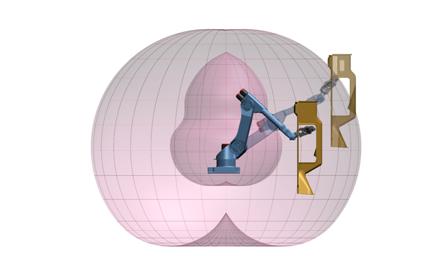
Новая функция анализа рабочего пространства (Workspace Analysis - WSA) позволит вам разместить деталь легко и быстро. Ориентация и правильное размещение детали часто отнимают много времени при решении задач программирования. Функция WSA определяет, будет ли ваша деталь располагаться в зоне досягаемости рабочего органа робота. В результате значительно сокращается время, необходимое для выполнения действий по правильному размещению детали в пространстве.
Функция WSA может быть полезна и при проектировании крепёжных приспособлений, при проверке правильности выбора конкретной модели робота и его общей установки. Функция позволяет визуально определить оптимальную установку за считанные минуты, тогда как ранее пользователю требовалось совершить для этого ряд дополнительных действий методом проб и ошибок.
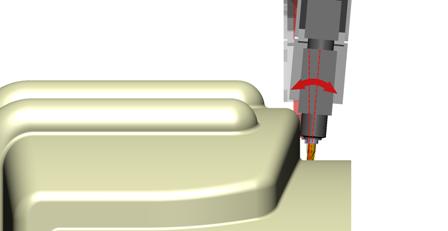
Оптимизации углов наклона
Новый инструмент оптимизации углов наклона (Tool Tilt Optimization - TTO) предоставляет дополнительные функциональные средства оптимизации перемещений, позволяющие избежать столкновений рабочих частей робота с деталью. Функция дает пользователю возможность просто и эффективно управлять углами наклона и получать плавные перемещения рабочих частей робота. Теперь пользователь может полностью контролировать направление наклона и находить решение проблем, которые прежде устранить было трудно.
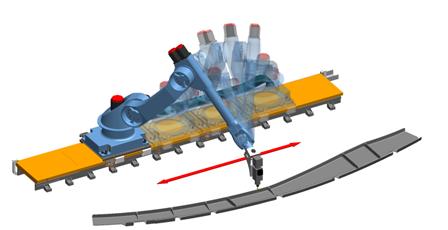
Оптимизация линейных перемещений
Добавлен новый, эффективный инструмент оптимизации линейных перемещений манипулятора. Гибкий инструмент для определения положения робота на линейной направляющей позволяет максимально использовать всё рабочее пространство, задействуя все возможности робота. Синхронизация движений робота с его перемещениями по линейной направляющей обеспечивает непрерывный технологический процесс, не требующий дополнительного времени на изменение положения робота.
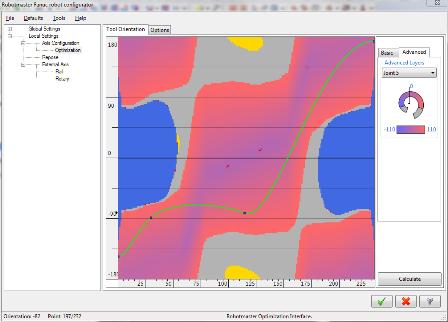
Улучшения функции оптимизации движений робота
Возможности оптимизации улучшены и дополнены новыми опциями. Градиентная карта отображает угловое положение каждого из суставов при движении, а также положение локтя робота. Эти усовершенствования предоставляют новые мощные инструменты для оптимизации положения робота, помогая пользователю быстро добиться необходимой ориентации каждого из суставов манипулятора.
Дополнительные усовершенствования функции оптимизации:
- добавлена возможность оптимизации трёх параметров: поворота инструмента, наклона инструмента и положения на линейной направляющей;
- возможные ошибки траектории отображаются красной полосой на нижней линейке, а положение курсора над ней сообщает об ошибке;
- во время оптимизации обеспечивается контроль ошибок на каждом участке траектории;
- используется новая техника отображения сложных поворотов робота, полезная также для устранения сингулярности в суставах номер 4 и 6 стандартного шестиосевого робота.
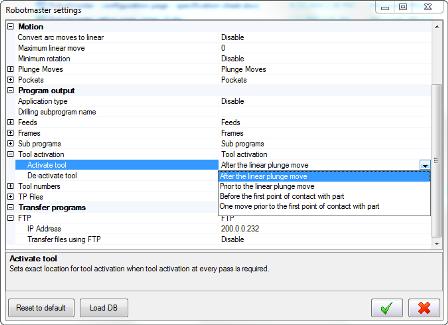
Графический конфигуратор постпроцессора
Новый конфигуратор постпроцессора позволяет быстро установить соответствующие настройки для управления программными кодами робота. Для каждого бренда предлагается широкий диапазон параметров конфигурации. Это обеспечивает гибкую настройку управляющих кодов, способную в полной мере учесть синтаксис и особенности робота.
Новые возможности и улучшения
Продвинутая оптимизация:
- Добавлена возможность оптимизации трёх параметров: поворота инструмента, наклона инструмента и положения на линейной направляющей
- Ошибки траектории отображаются красной полосой на линейке в нижней части окна и положение курсора над ней сообщает об ошибке
- Обеспечивается обнаружение ошибок между точками перемещения по траектории
- Градиентная карта - новая техника отображения положения каждого сустава робота или внешних осей. Это крайне полезно для устранения типичных ошибок в суставах номер 4 и 6 стандартного шестиосевого робота
- Угол сгиба локтя робота отображается на градиентной карте, что дает возможность лучше управлять положением робота
- Для любого из суставов робота можно установить зону наблюдения и контролировать величину его поворота
Средства повышения производительности:
- функция анализа рабочего пространства
- возможность задавать в симуляторе числовые значения параметров для изменения позиции робота
- использование глобальных параметров настроек перемещения и конфигурации робота при локальной настройке для конкретной операци
- преобразование движения суставов в линейные перемещения для всех брендов роботов
- большая гибкость при введении пользовательских настроек в диалоговых окнах
- возможность настройки параметров по умолчанию для локальных настроек
- сохранение и вызов глобальных и локальных настроек
- возможность проверки траектории с учетом положения робота при выходе из предыдущей операции обработки во время симуляции и оптимизации
- продвинутый контроль осей вращения
Особенности интерфейса:
- разделены глобальные и локальные параметры
- глобальные и локальные параметры доступны из основного меню среды Mastercam
- новый интерфейс настроек предпочтений пользователя
- среда управления параметрами организована так, чтобы быть понятной даже пользователям, не имеющим большого опыта в использовании робота
Встроенный симулятор для проверки и отладки УП:
- высокая производительность при симуляции больших уп
- отличная графика и визуализация с выбором разных способов отображения процесса симуляции
- режим просмотра управления кинематическими данными ячейки робота
- Мониторинг текущего местонахождения инструмента на траектории движения
- для упрощения поиска ошибок в процессе симуляции добавлена возможность отключать ограничения на движение суставов робота
Постпроцессирование:
- высокая скорость постпроцессирования
- графический интерфейс для конфигурирования постпроцессоров облегчает настройку параметров
ROBOTMASTER X4
Robotmaster X4 предлагает несколько важных нововведений, включая оптимизацию траектории, ускорение расчетов и поддержку дополнительных линейных направляющих и поворотных устройств. УП для робота теперь можно легко оптимизировать графически. Новая версия устанавливает новый стандарт програмирования роботов теми же привычными средствами и функциями, какторые уже десятилетиями применяются для подготовки УП для станков с ЧПУ.
Оптимизация траектории
Новые функции оптимизации позволяют графически определить проблемные зоны в траектории.
- Пользователь может управлять и редактировать полученную траекторию для робота прямо в графическом окне, изменяя форму кривых. Это позволяет изменить углы поворотов составных частей робота, избегая крайних положений и выходов за пределы допустимых значений поворотов.
- На граффической диаграмме разными цветами отображаются следуюшее проблемные области:
- Красный цвет - сингулярность
- Синий цвет - выход из зоны достигаемости
- Жёлтый цвет - выход за пределы допустимых значений поворота суставов
- Фиолетовый цвет - переворот кисти
- Коричневый цвет - превышение максимально допустимых значений угловой скорости вращения суставов
- Бордовый цвет – соударения рабочих частей робота между собой, с дополнительной оснасткой или с обрабатываемой деталью
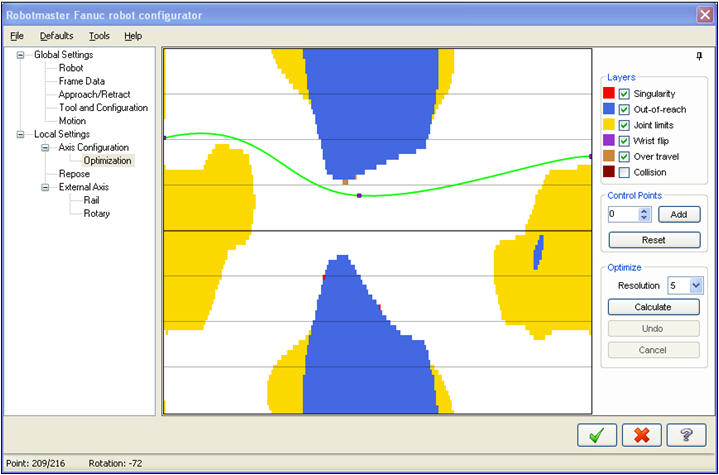
Вам необходимо просто переместить условную траекторию так, чтобы она обходила проблемые области, обозначенные на диаграмме различными цветами.
Интерфейс
Сделаны следуюшие изменения в конфигурационных диалоговых окнах:
- Обозначения в дереве параметров укажут, в какой из групп были сделаны изменения
- Добавлен калькулятор перерасчета поворотов, позволяющий рассчитывать значения между разными способами задания ориентации в пространстве
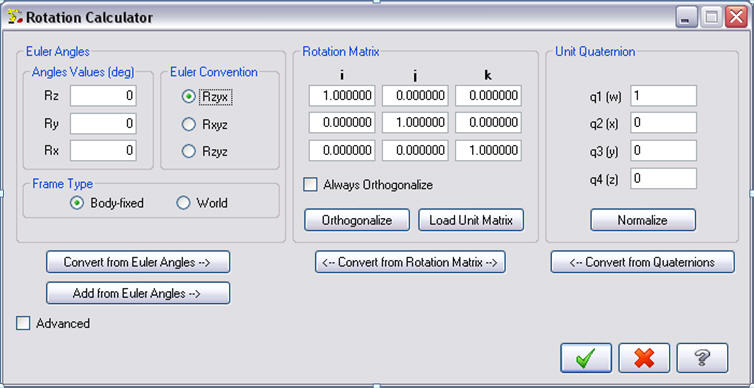
Калькулятор перерасчета поворотов
Симуляция
В средствах симуляции и визуализации движений робота введены следующие изменения:
- Обеспечены более гладкие движения
- В зоне отображения информации о позициях перемещения их координаты соответствуют положению точек в УП
- Возможно включить или отключить отображение траектории движения инструмента в пространстве
Отображение траектории движения инструмента в пространстве
Дополнительные оси
Добавлены следующие нововведения:
- можно управлять одновременно 11 осями движения
- максимальное количество дополнительных линейных направляющих увеличено (возможно добавить 3 оси)
- максимальное количество дополнительных поворотных осей увеличено (возможно добавить 2 оси)
- Возможны следующие комбинации степеней свободы:
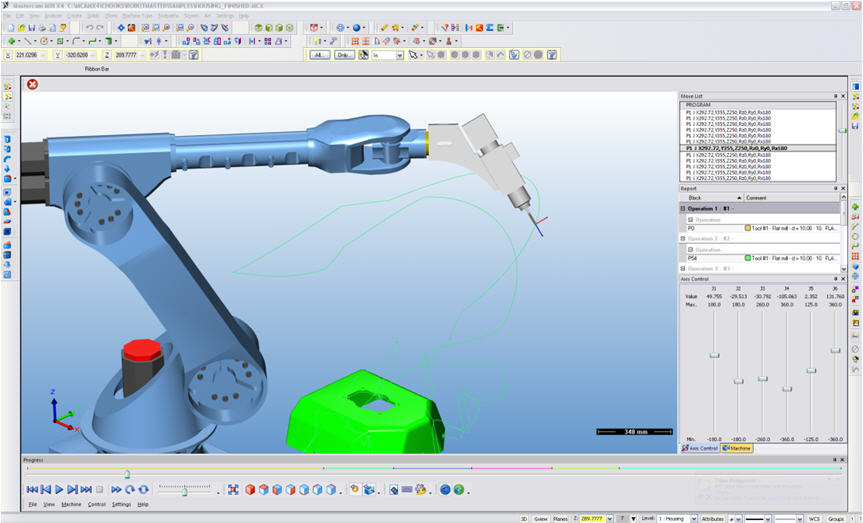
- Робот установлен на трёх линейных направляющих, а деталь на двухосевом поворотном устройстве
- Робот установлен неподвижно, а деталь на двухосевом поворотном устройстве
- Робот установлен на трёх линейных направляющих, а деталь удерживается кистью робота
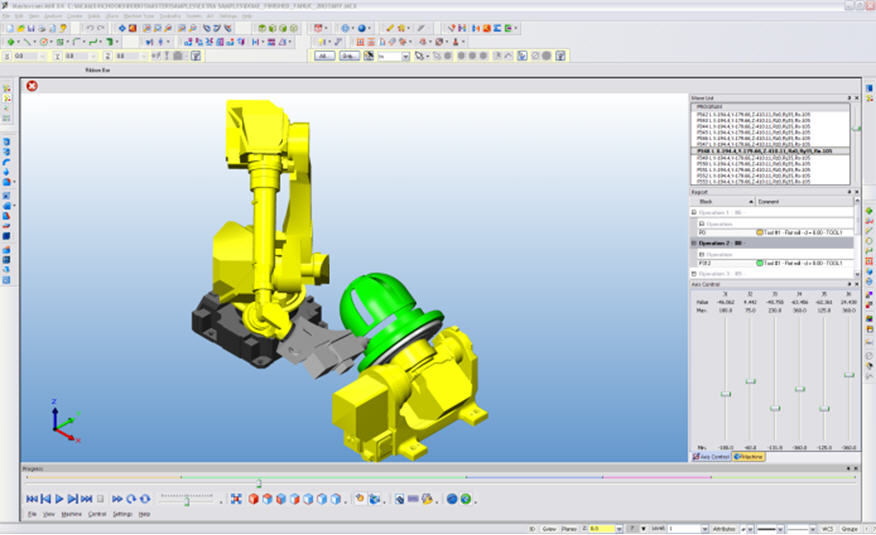
Деталь установлена на двух столах качения
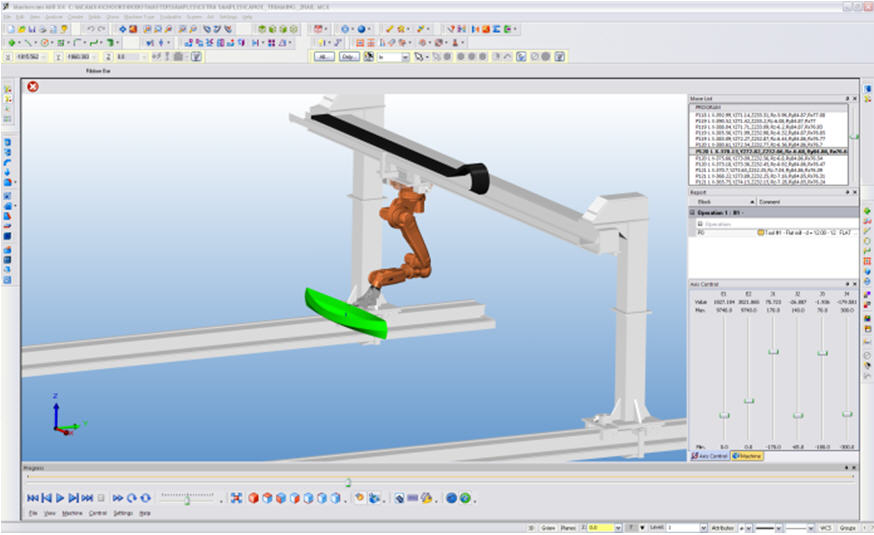
Робот установлен на двух рельсах
Кинематика робота
В системе используется обновлённый алгоритм расчётов траекторий и способов задания кинематики и параметров робота:
- Поддержка любого шестиосевого робота со стандартным исполнением кисти
- Возможность замены теоретических параметров робота реальными значениями после его калибровки
- Быстрое постпроцессирование траекторий, содержащих более 150000 узловых точек
- Скорость расчёта траекторий увеличена более чем в 10 раз по сравнению с предыдущей версией ПО
Постпроцессоры
Проведены изменения в средствах постпроцессирования:
- Улучшено управление командами включения/выключения инструмента для определенных видов траекторий (сварка, покраска, нанесение материала, водяная и лазерная резка)
- Использование комментариев и возможность ручного ввода дополнительных команд
- Ускорение процесса постпроцессирования длинных по объёму УП
